



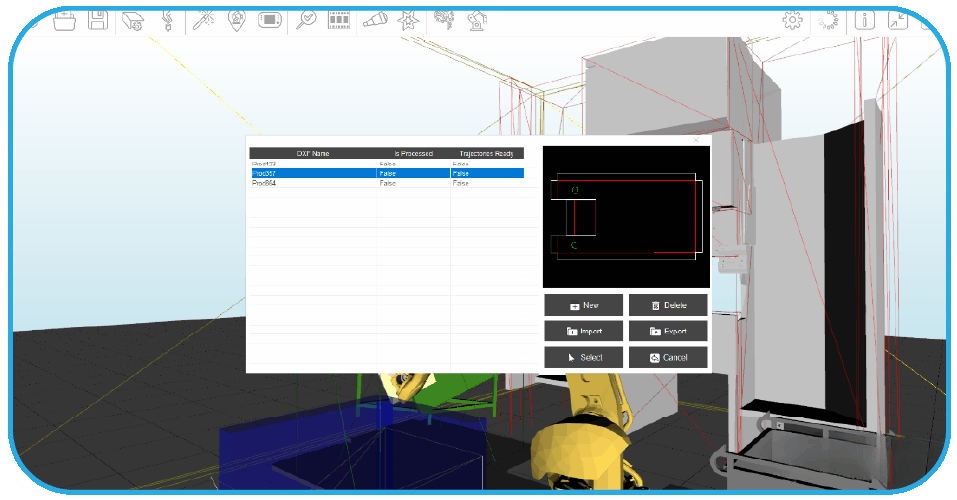
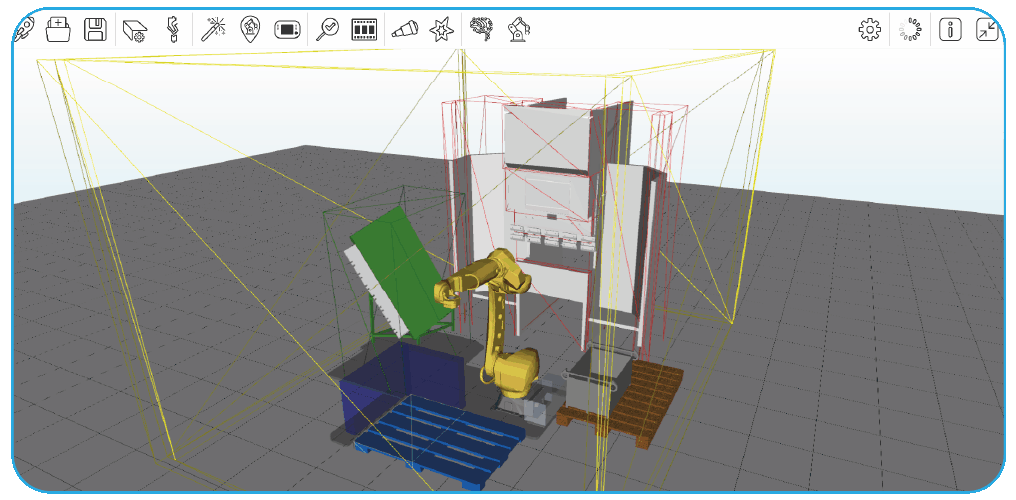



Multi-component management
(stacks, centering devices, pallets) up to ten per type.
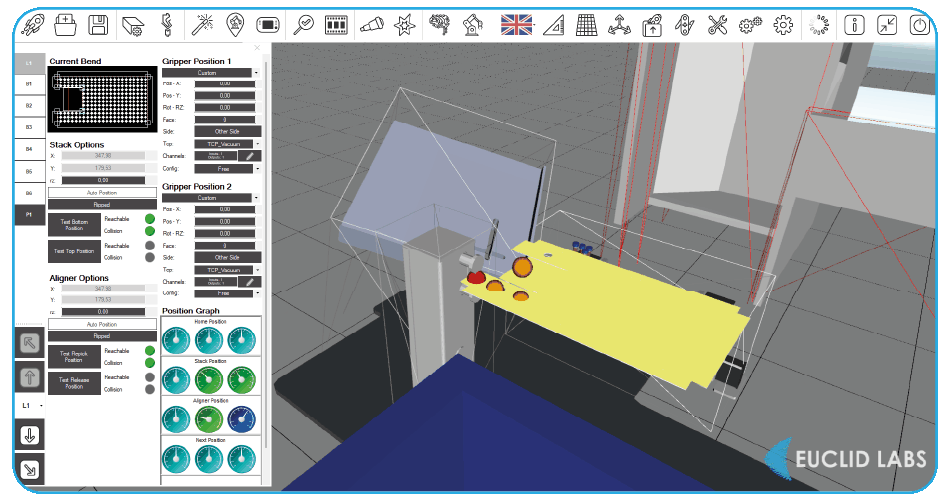
Automatic calculation of bend deduction
for realistic simulation.

Multi-TCP management
(grippers, repositioning supports, back gauges).
Insertion of intermediate points
to perform additional operations before and after bending.
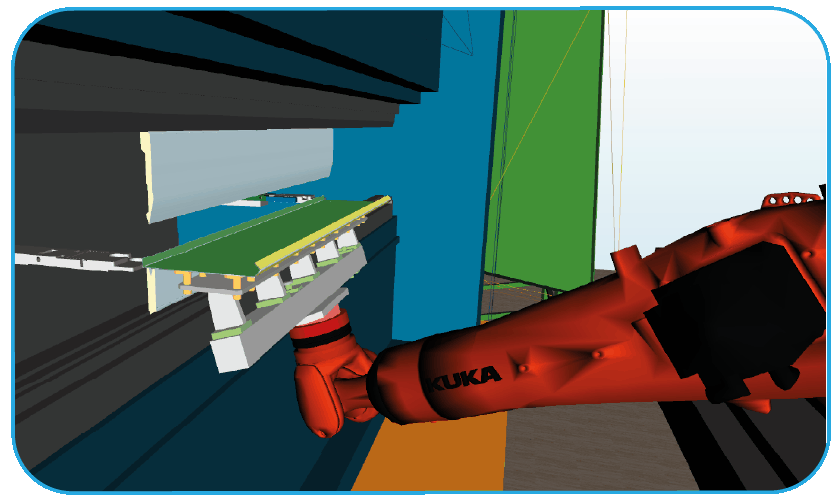
Advanced interpolation engine
for robot trajectories that accurately replicate real execution.
